Welcome to our project archives!
Showing: 10 results
 Past projects
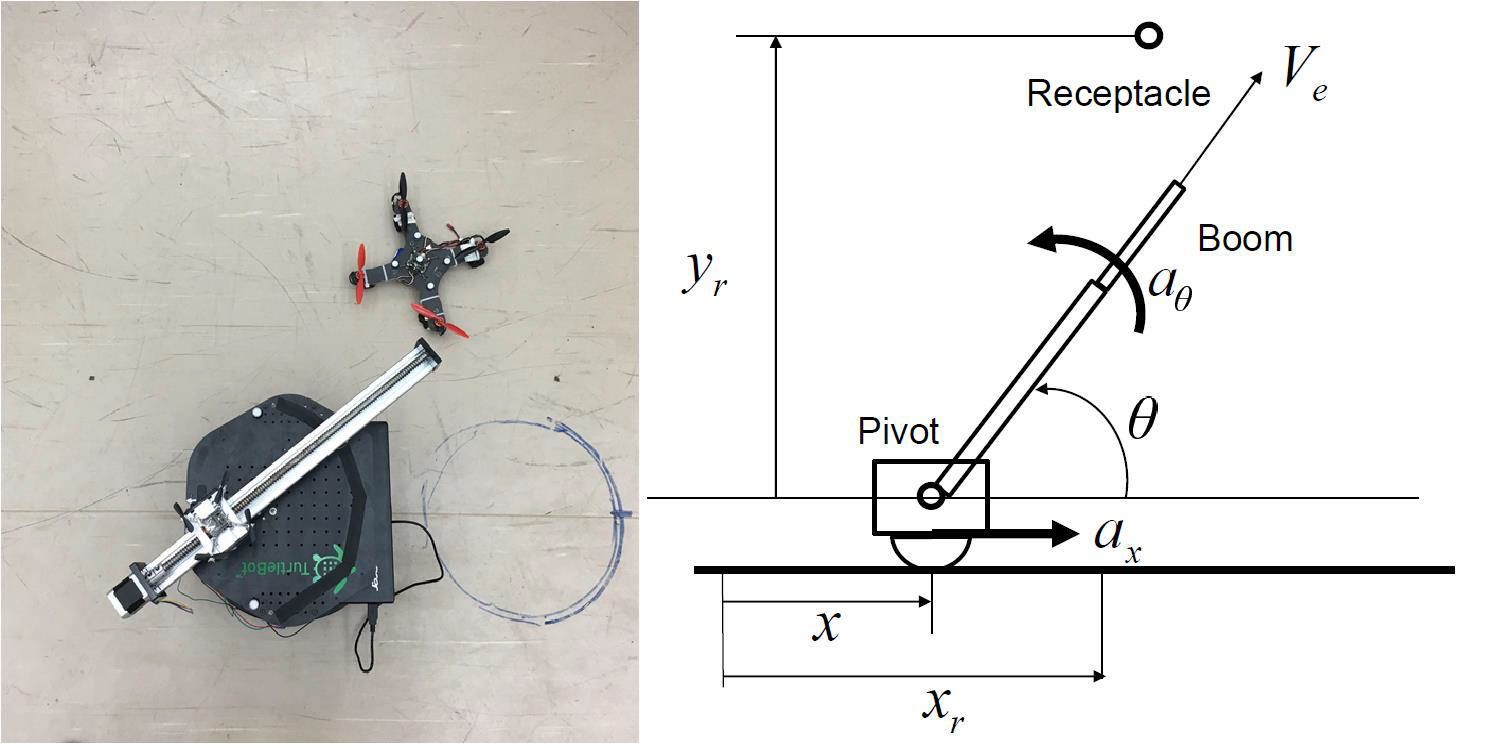
Aerial Refueling Demonstrator
By:
Meir Nemirovsky
Advisor:
Past projects
Aerial Refueling Demonstrator
By:
Meir Nemirovsky
Advisor:
Tal Shima
Martin Weiss Design and implementation of an aerial refueling emulated by ground robots.
Past projects
time-to-go estimation from Robot webcam
By:
Yaron Cohen, Hanan Amar
Advisor:
Tal Shima
Jha Bhargav
Estimating ??? by image processing in real time with a simple robot webcam.
Tal Shima
Jha Bhargav
 Past projects
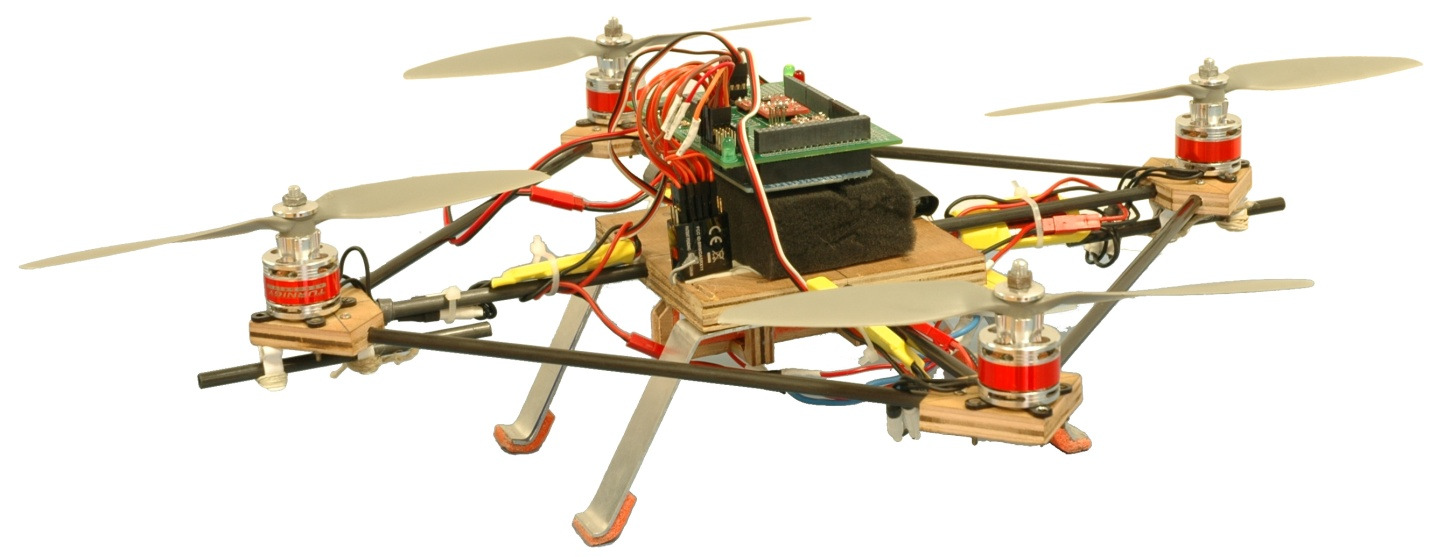
Aquilo – Quadrotor
By:
Yaron Cohen, Hanan Amar
Advisor:
Tal Shima
Past projects
Aquilo – Quadrotor
By:
Yaron Cohen, Hanan Amar
Advisor:
Tal Shima 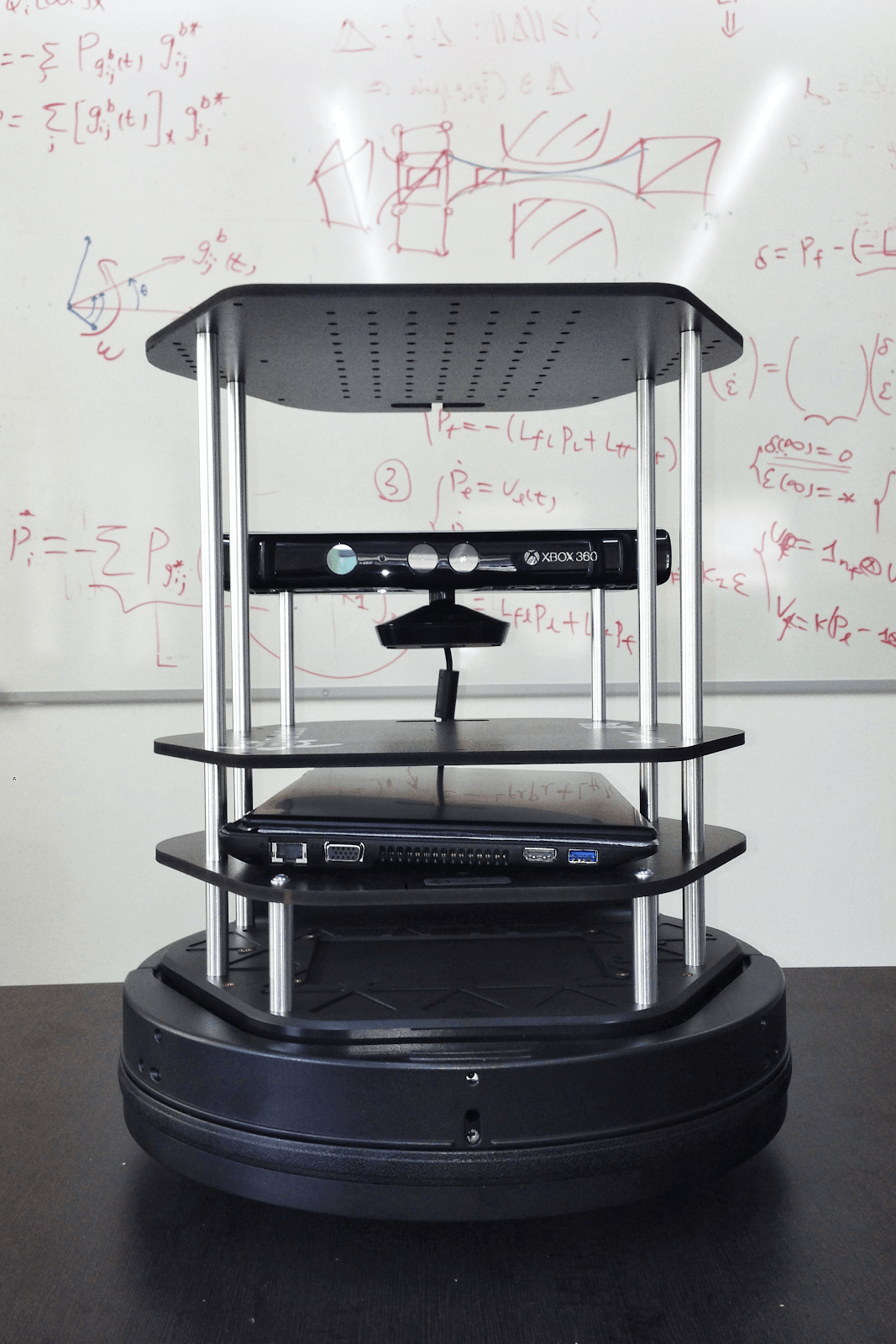 Past projects
Trajectory planning for the TurtleBotII Robot
By:
Barak Or
Advisor:
Daniel Zelazo
Past projects
Trajectory planning for the TurtleBotII Robot
By:
Barak Or
Advisor:
Daniel Zelazo
Past projects
The Effect of wind on ground-tracker quadcopter
By:
Offek Karp
Advisor:
Moshe Idan
The purpose of this paper is to look forward on the effect of wind on a quadcopter. The study is done on a simple quadcopter that has a PD controller on its attitude and altitude, and is based on SIMULINK simulation of it. It includes a full modeling of a quadopter and a controller for it, and the study of its basic dynamics, modeling of the effect of wind on the quadcopter and simulation of it.
 Past projects
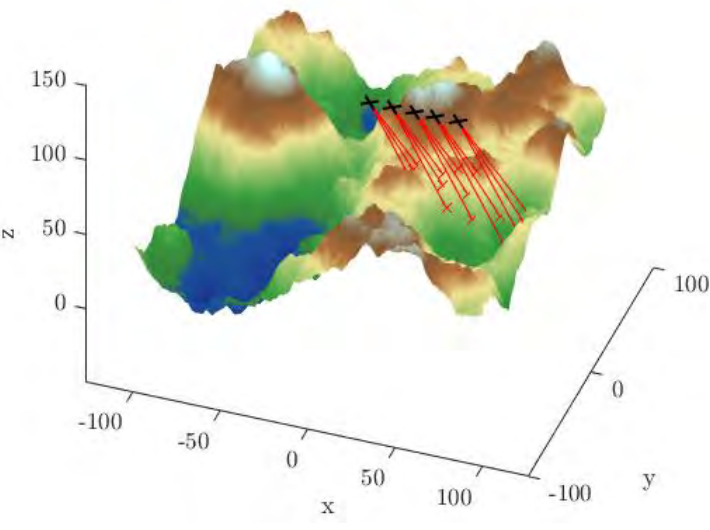
Multirotor Terrain Following using Laser Range Finders
By:
Eden Shahar
Advisor:
Moshe Idan
Past projects
Multirotor Terrain Following using Laser Range Finders
By:
Eden Shahar
Advisor:
Moshe Idan
Past projects
Identification of Aerodynamic Parameters of an Experimental Quadcopter
By:
Evyatar Matmon, Shir Kuzlovskii
Advisor:
Moshe Idan
Tal Shima
Eugene Edison
Moshe Idan
Tal Shima
Eugene Edison
 Past projects
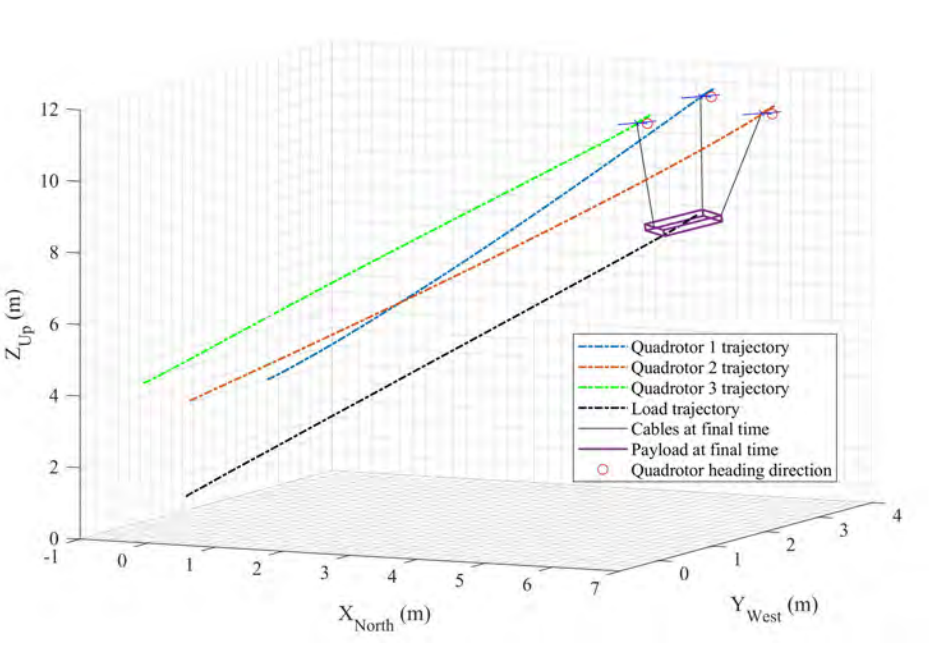
Transportation of a Slung Load using Multiple Quadrotor UAVs while maintaing a constant altitude
By:
Tomer Itzhak Levy
Advisor:
Moshe Idan
Past projects
Transportation of a Slung Load using Multiple Quadrotor UAVs while maintaing a constant altitude
By:
Tomer Itzhak Levy
Advisor:
Moshe Idan
Past projects
Performance Analysis of a 3-D Terrain Following System
By:
David Dayan
Advisor:
Moshe Idan
 Past projects
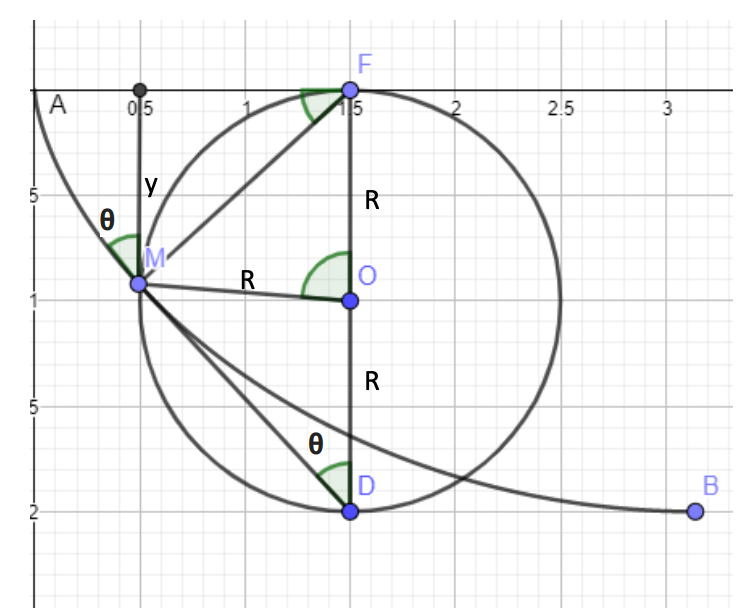
Learning solutions provided for the Brachistochrone Problem
By:
Ido Braun
Advisor:
Yossi Ben Asher
Past projects
Learning solutions provided for the Brachistochrone Problem
By:
Ido Braun
Advisor:
Yossi Ben Asher