Welcome to our project archives!
Showing: 23 results
 Seeking Students
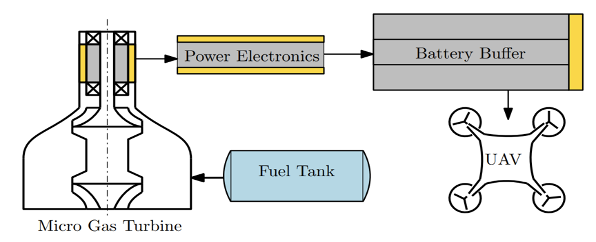
Flight Control Design for Next-generation Quadcopter
Advisor:
Daniel Zelazo
Seeking Students
Flight Control Design for Next-generation Quadcopter
Advisor:
Daniel Zelazo  Seeking Students
Path Following using low-fidelity camera on a quadcopter
Advisor:
Daniel Zelazo
Seeking Students
Path Following using low-fidelity camera on a quadcopter
Advisor:
Daniel Zelazo 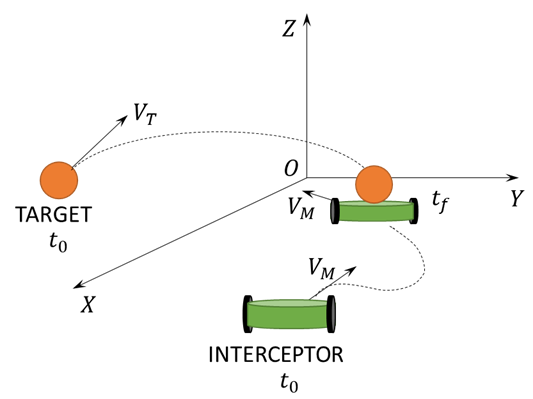 Seeking Students
Interception of a Ballistic Target with an Agile Robot
Advisor:
Seeking Students
Interception of a Ballistic Target with an Agile Robot
Advisor:
Tal Shima
Gleb Merkulov
 Seeking Students
Graph Connectivity for Multi-Agent Systems
Advisor:
Daniel Zelazo
Seeking Students
Graph Connectivity for Multi-Agent Systems
Advisor:
Daniel Zelazo 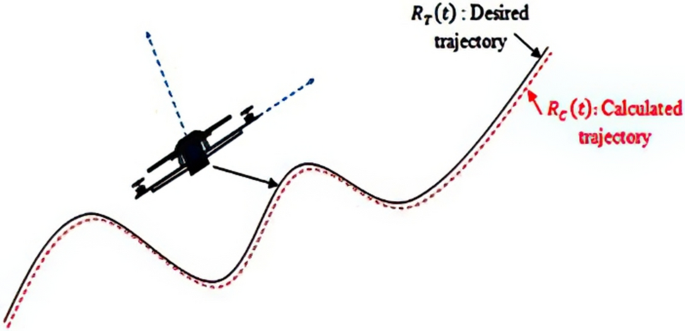 Seeking Students
Quadrotor Trajectory Following
Advisor:
Seeking Students
Quadrotor Trajectory Following
Advisor:
Tal Shima
Jha Bhargav
 Seeking Students
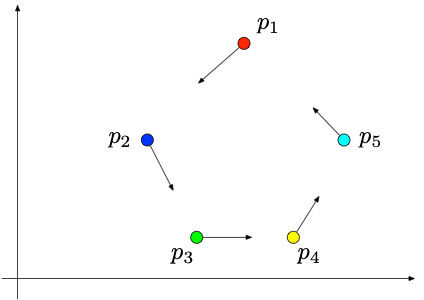
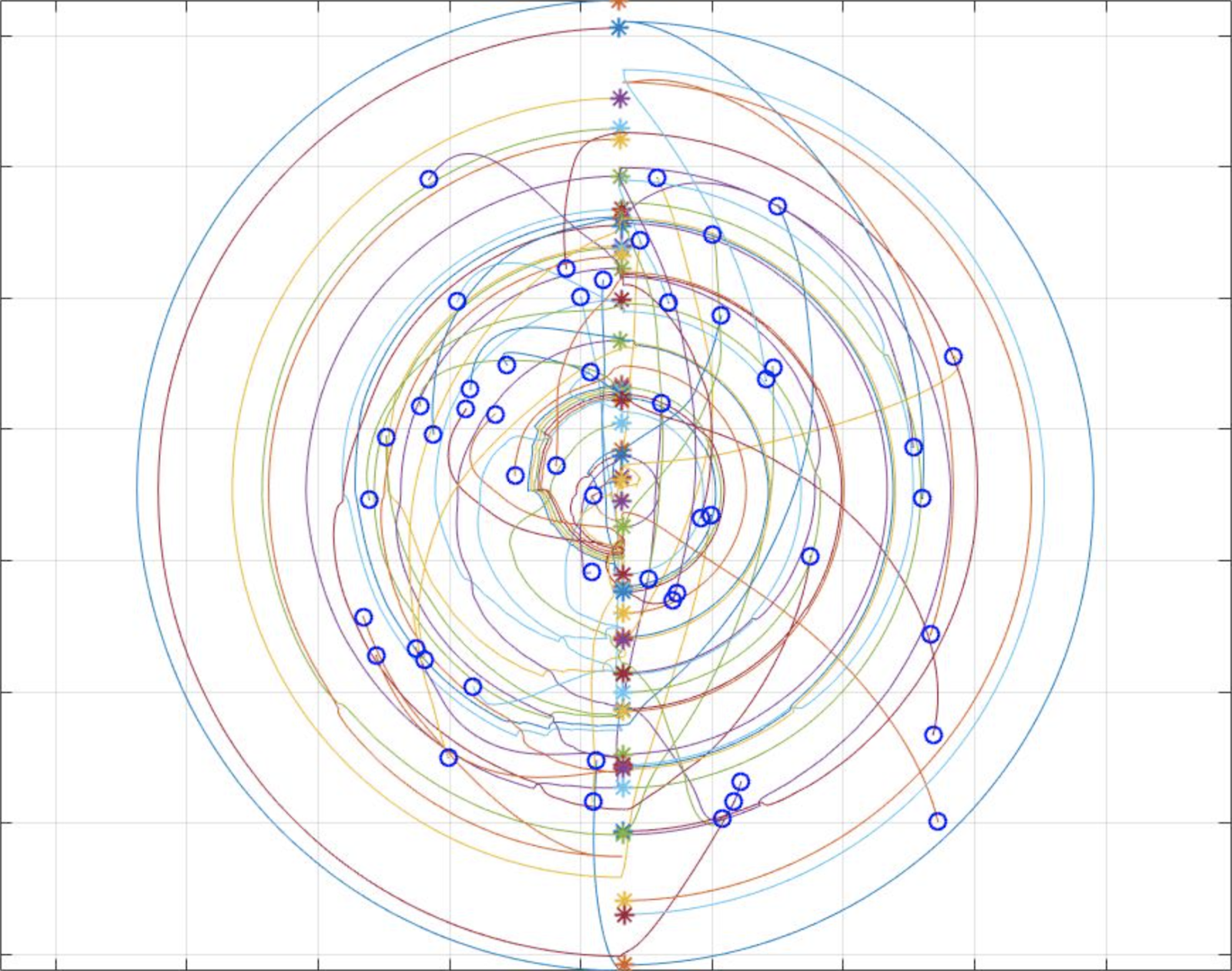
Cyclic Pursuit
Advisor:
Seeking Students
Cyclic Pursuit
Advisor:
Tal Shima
Jha Bhargav
 Seeking Students
Large Swarm Control
Advisor:
Daniel Zelazo
Seeking Students
Large Swarm Control
Advisor:
Daniel Zelazo 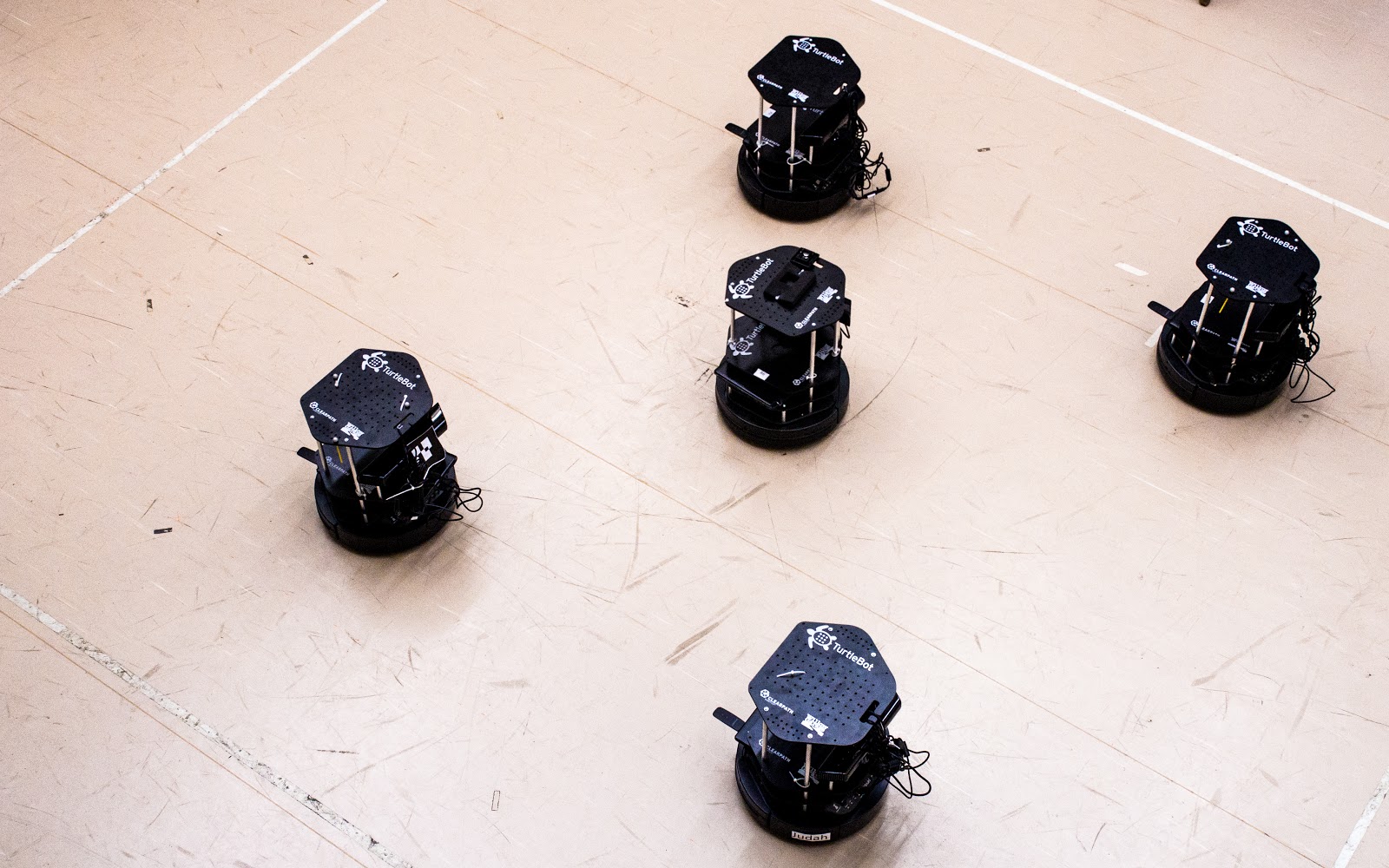 Seeking Students
Formation control strategies for TurtleBotII Robots
Advisor:
Daniel Zelazo
Seeking Students
Formation control strategies for TurtleBotII Robots
Advisor:
Daniel Zelazo 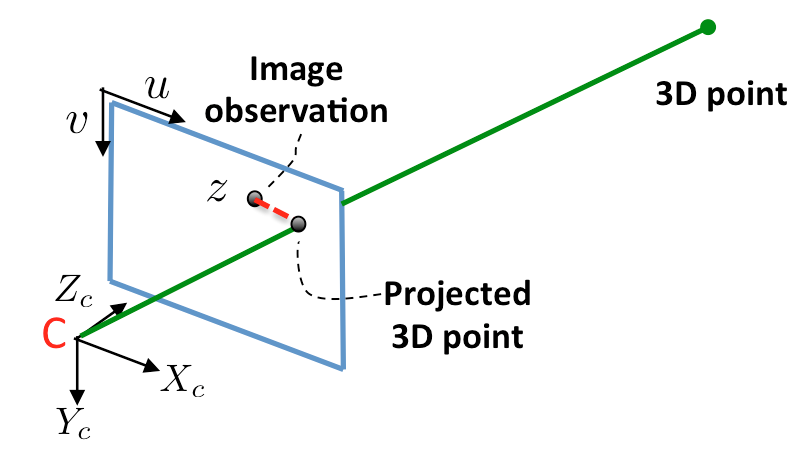 Seeking Students
Pose estimation of quadcopter
Advisor:
Seeking Students
Pose estimation of quadcopter
Advisor:
Ruslan Archipov
Daniel Zelazo
Vadim Indelman
 Seeking Students
Production of Rolling Spider Quadcopter Replacements
Advisor:
Ruslan Archipov
Seeking Students
Production of Rolling Spider Quadcopter Replacements
Advisor:
Ruslan Archipov 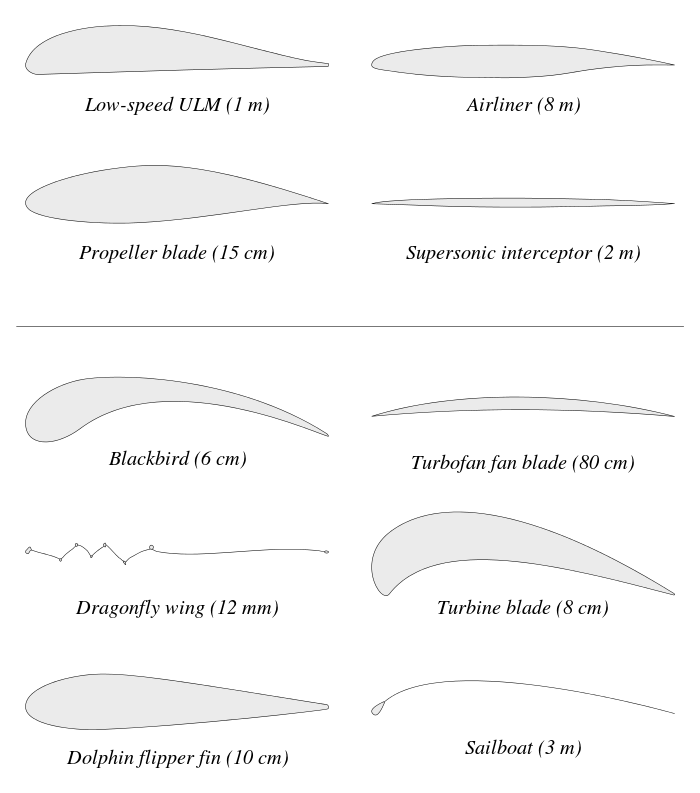 Seeking Students
Control of an Airfoil on Rotary Pendulum
Advisor:
Ruslan Archipov
Seeking Students
Control of an Airfoil on Rotary Pendulum
Advisor:
Ruslan Archipov 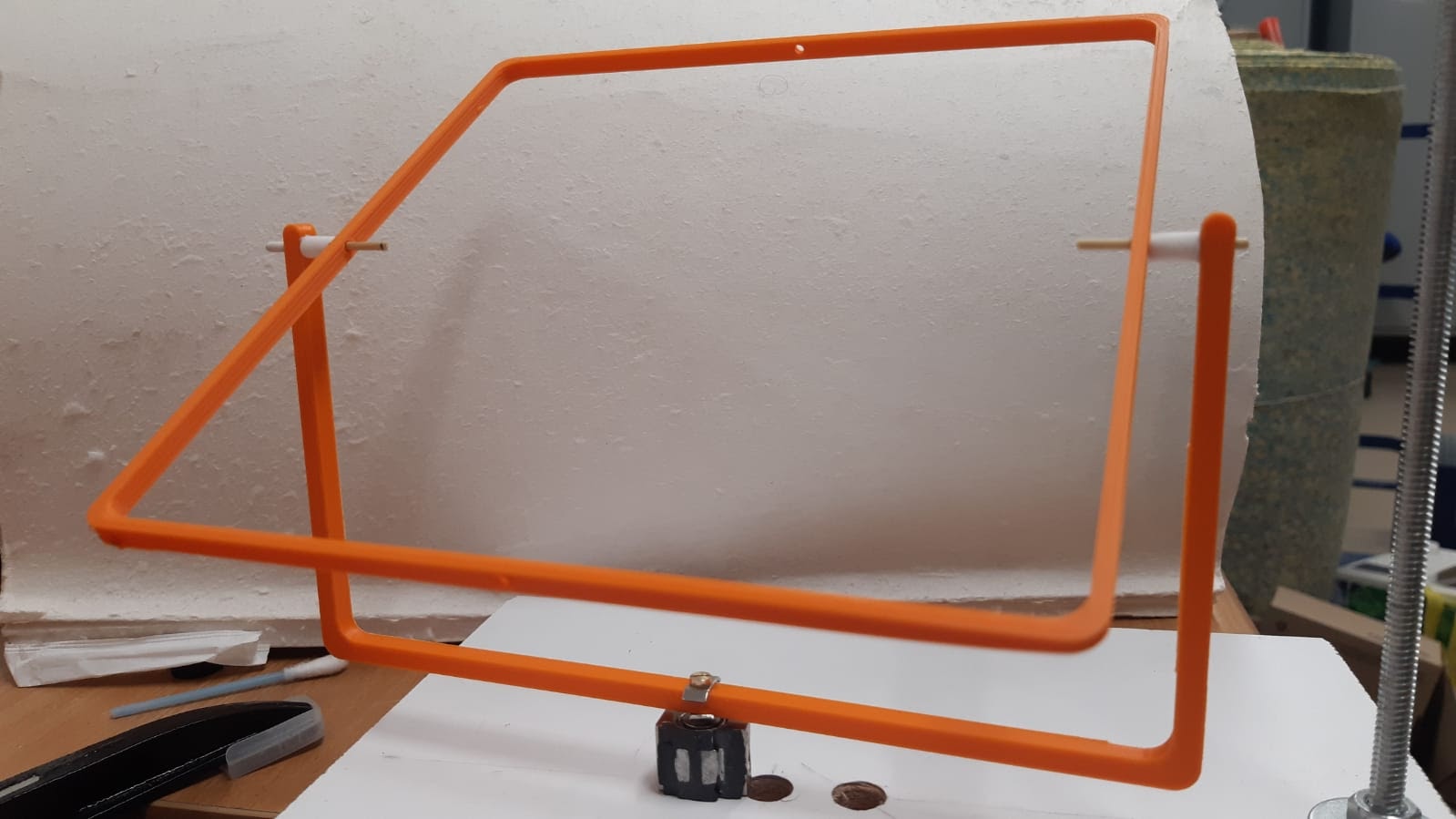 Seeking Students
Gimbal for Quadcopter Lab
Advisor:
Ruslan Archipov
Seeking Students
Gimbal for Quadcopter Lab
Advisor:
Ruslan Archipov  Seeking Students
Control of a 3-Axis Gimbal
Advisor:
Ruslan Archipov
Seeking Students
Control of a 3-Axis Gimbal
Advisor:
Ruslan Archipov 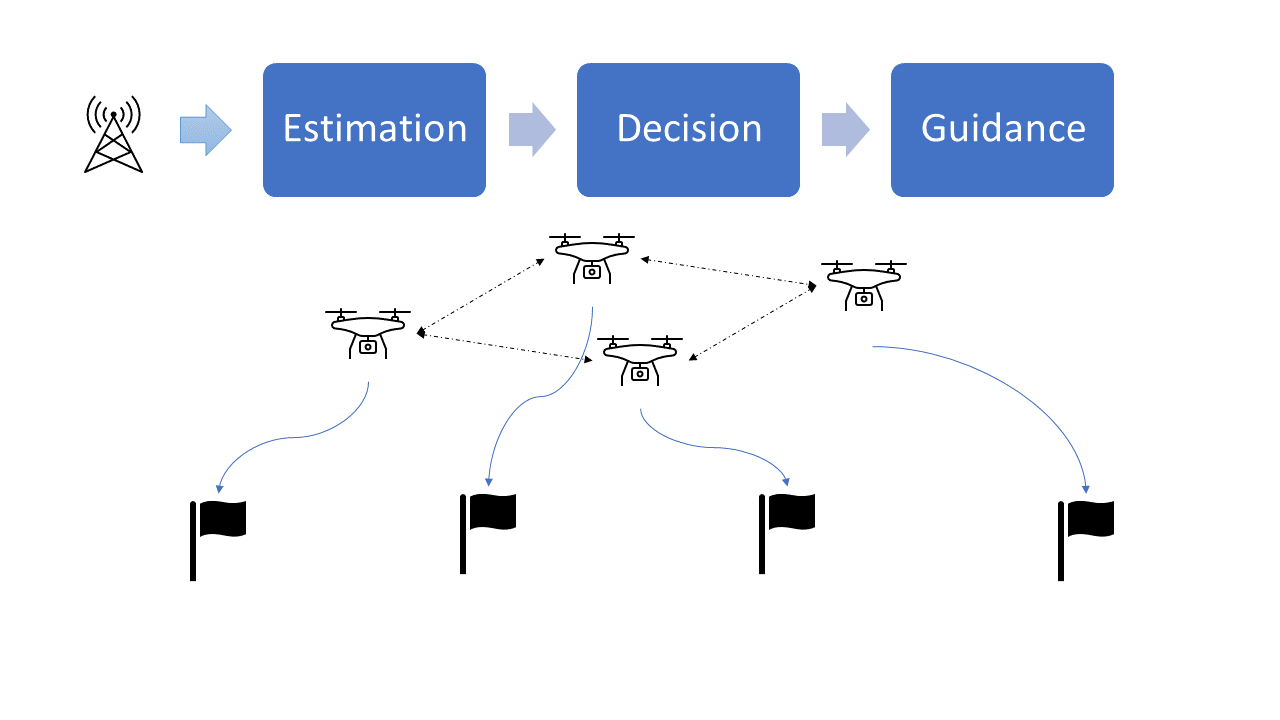 Seeking Students
Guidance Sharing Information with Range Sensors
By:
Liat Peled (Rafael)
Advisor:
Daniel Zelazo
Seeking Students
Guidance Sharing Information with Range Sensors
By:
Liat Peled (Rafael)
Advisor:
Daniel Zelazo  Seeking Students
Sensor Suites for DC Motor Lab
Advisor:
Ruslan Archipov
Seeking Students
Sensor Suites for DC Motor Lab
Advisor:
Ruslan Archipov 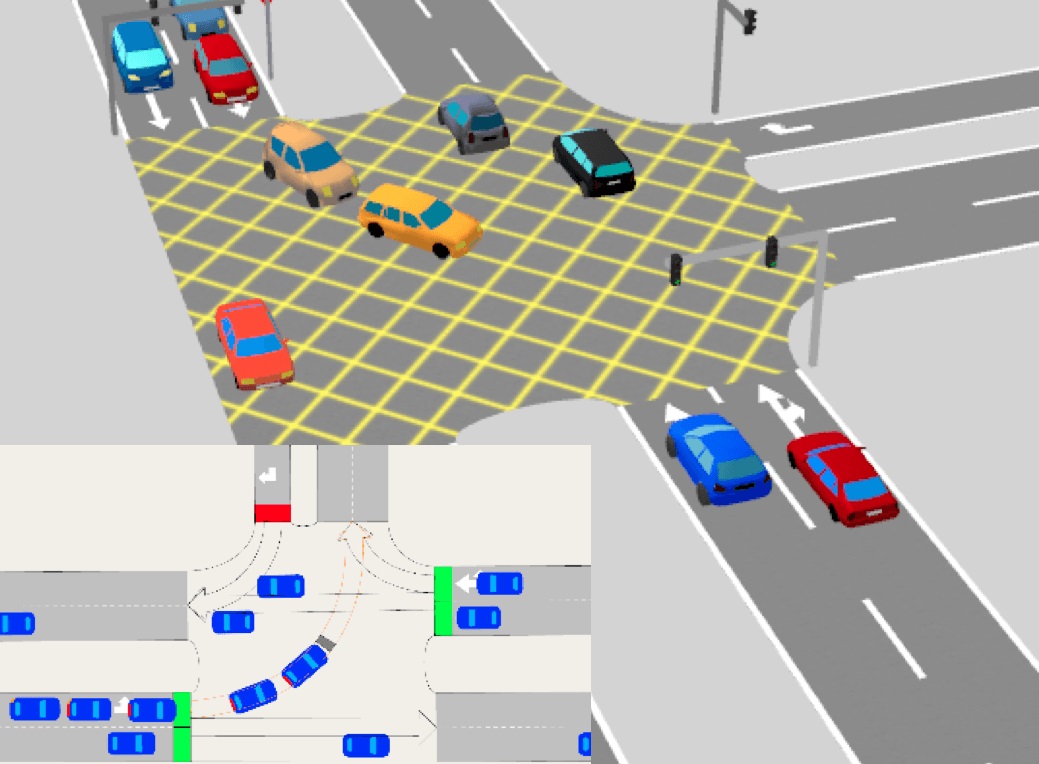 Seeking Students
Simulation of Urban Environment
By:
Anna Clarke
Advisor:
Anna Clarke
Seeking Students
Simulation of Urban Environment
By:
Anna Clarke
Advisor:
Anna Clarke 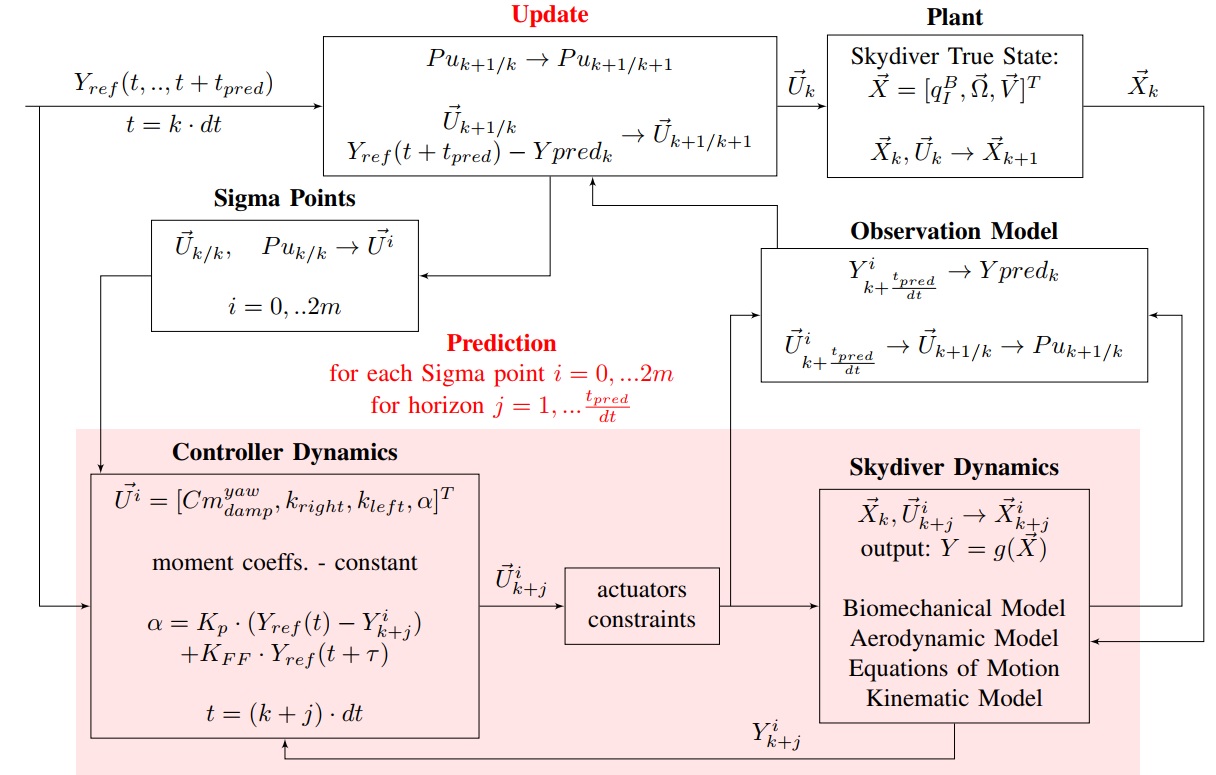 Seeking Students
Unscented Transform Controller (UTC) Applications
By:
Anna Clarke
Advisor:
Anna Clarke
Seeking Students
Unscented Transform Controller (UTC) Applications
By:
Anna Clarke
Advisor:
Anna Clarke  Seeking Students
Skydiver Model Trim Conditions
By:
Anna Clarke
Advisor:
Anna Clarke
Seeking Students
Skydiver Model Trim Conditions
By:
Anna Clarke
Advisor:
Anna Clarke  Seeking Students
Dynamic Model of a RAM Air Parachute
By:
Anna Clarke
Advisor:
Anna Clarke
Seeking Students
Dynamic Model of a RAM Air Parachute
By:
Anna Clarke
Advisor:
Anna Clarke  Seeking Students
Tracking Human Movements via Opti-Track
By:
Anna Clarke
Advisor:
Anna Clarke
Seeking Students
Tracking Human Movements via Opti-Track
By:
Anna Clarke
Advisor:
Anna Clarke  Seeking Students
VR Simulator of Human Movement
By:
Anna Clarke
Advisor:
Anna Clarke
Seeking Students
VR Simulator of Human Movement
By:
Anna Clarke
Advisor:
Anna Clarke  Seeking Students
VR Simulator of Parachute Flight
By:
Anna Clarke
Advisor:
Anna Clarke
Seeking Students
VR Simulator of Parachute Flight
By:
Anna Clarke
Advisor:
Anna Clarke  Seeking Students
AR Display of Ego-Motion and Posture
By:
Anna Clarke
Advisor:
Anna Clarke
Seeking Students
AR Display of Ego-Motion and Posture
By:
Anna Clarke
Advisor:
Anna Clarke