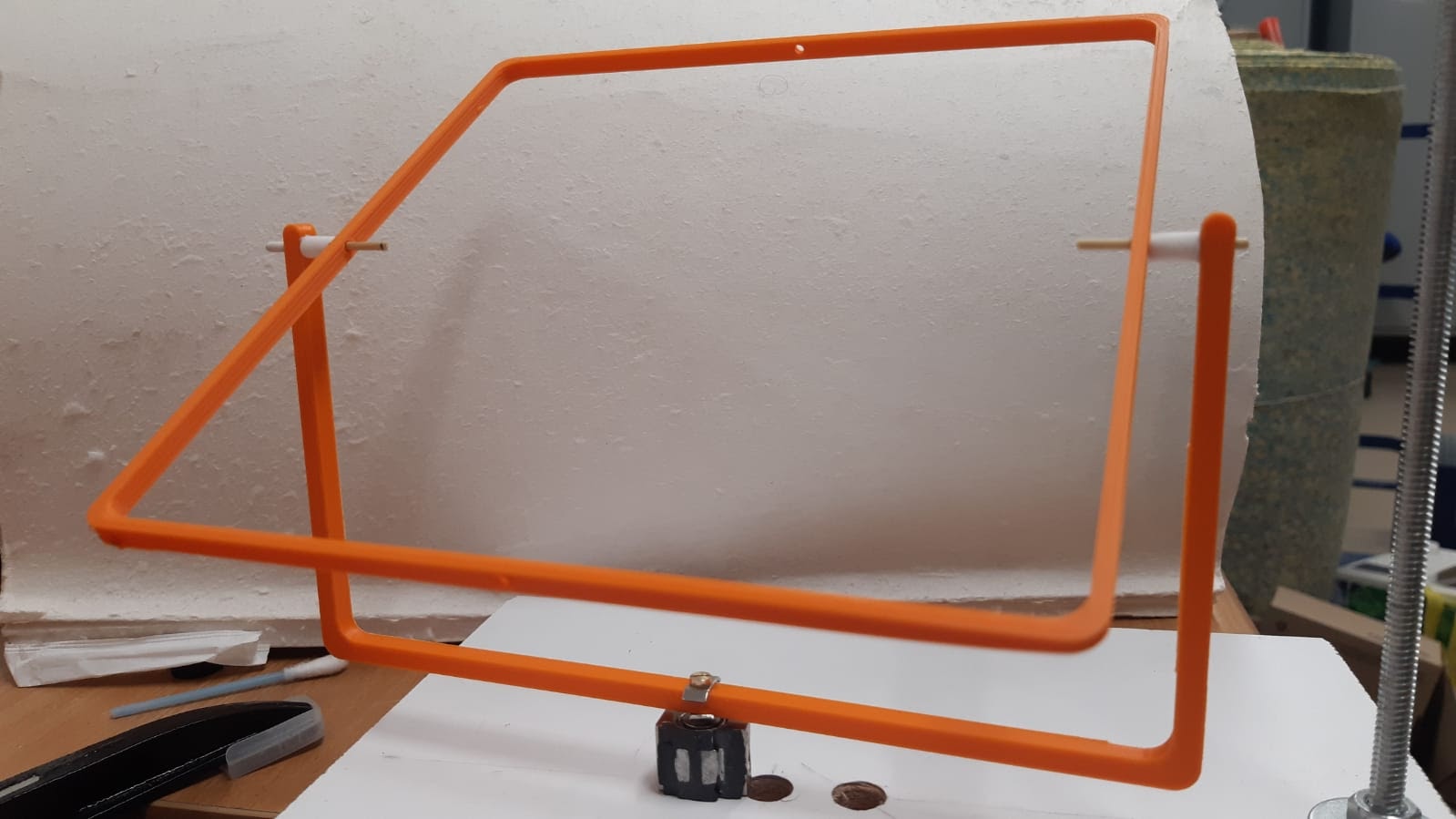
Description: Design and build a robust testing gimbal for control and estimation of a quadcopter. Includes mechanical design, sensor selection, and control design.