Interception of a Ballistic Target with an Agile Robot
Home•Projects•Interception of a Ballistic Target with an Agile Robot
Advisor:
Tal Shima Gleb Merkulov
Description:
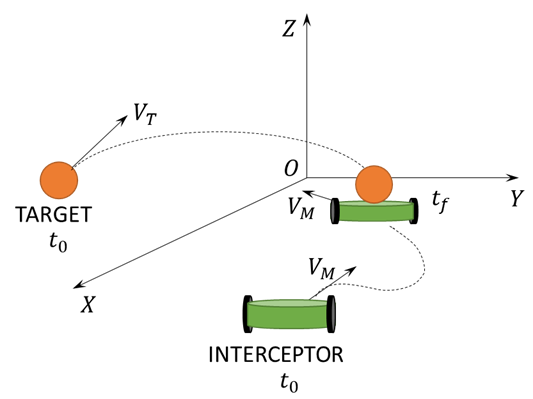
Design, implement, and test the guidance, navigation and control system for a constant-speed agile ground robot to catch a target flying a ballistic trajectory before it hits the floor.