Description:
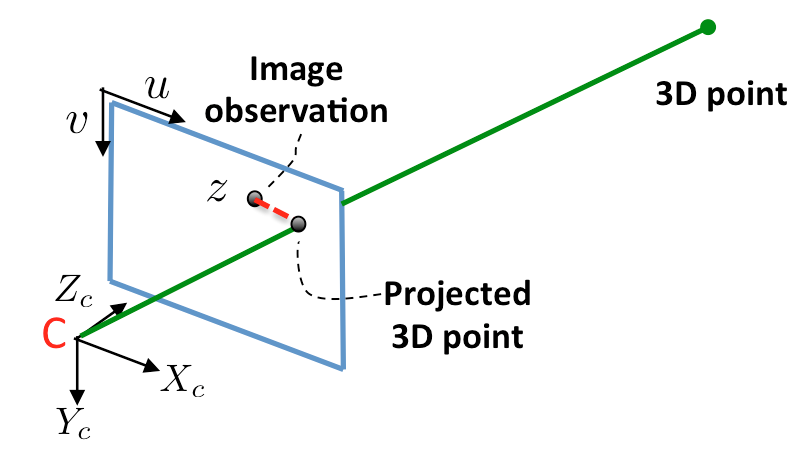
The advanced control lab currently uses a quadcopter as its experimental testbed. In order to compare various control and estimation algorithms, it is important to have knowledge of the true state of the system. One way to obtain partial knowledge is via pose estimation using a camera. The project will focus on the design and implementaiton of the estimator.