Description:
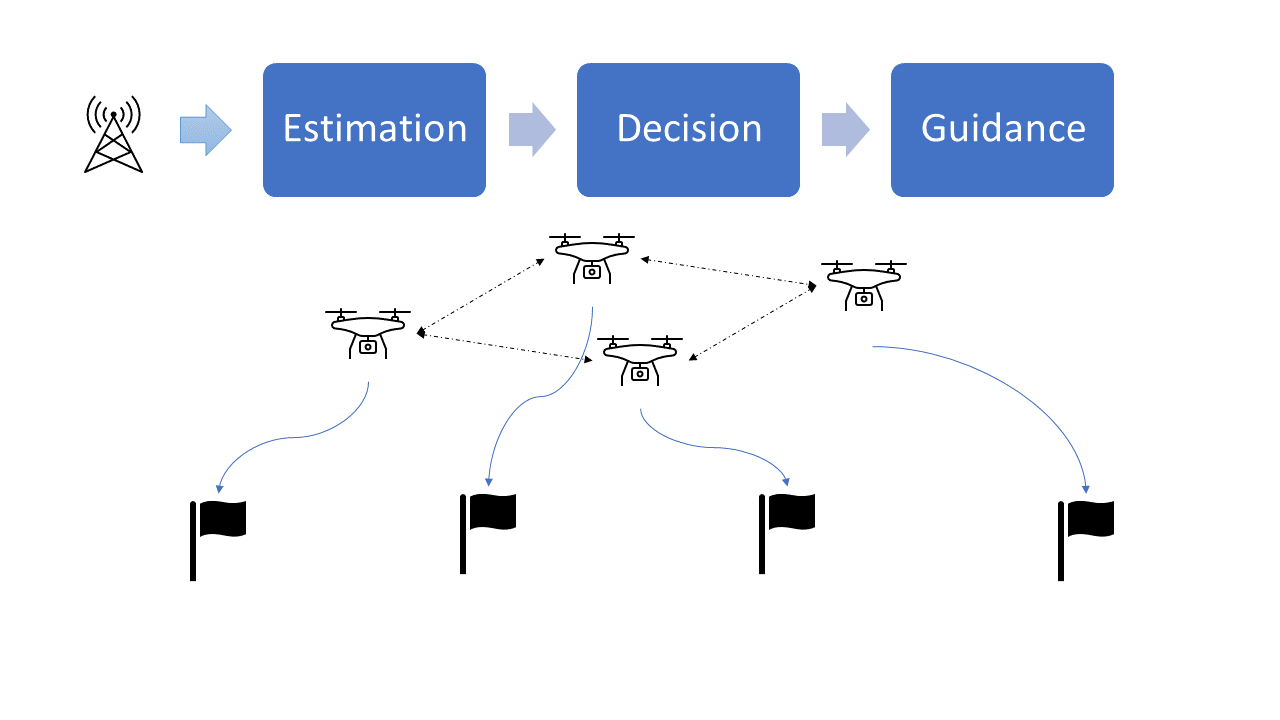
We want to develop and design a new guidance approach with range sensors only. These sensors have a lack in information. In order to enrich the information, we have to design the guidance in a group where each UAV has a different destination and shares its information with others.