Description:
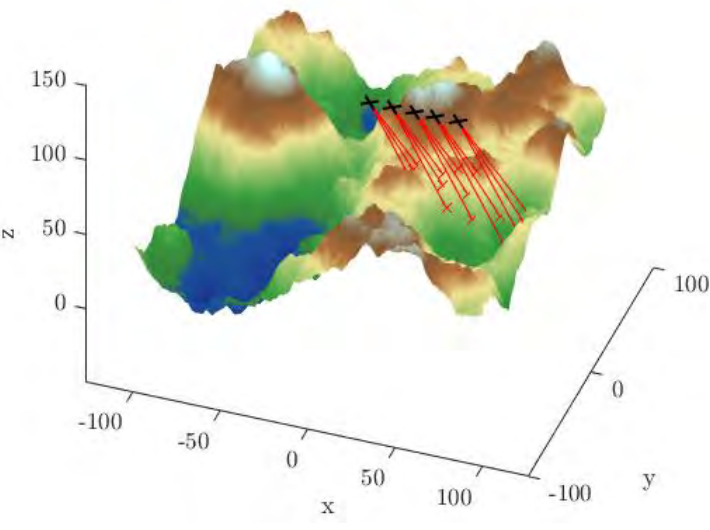
This research aims to examine the feasibility of terrain following guidance and control for a multirotor over non-planar three-dimensional terrain using laser range finder (LRF) measurements alone.
This research aims to examine the feasibility of terrain following guidance and control for a multirotor over non-planar three-dimensional terrain using laser range finder (LRF) measurements alone.