Description:
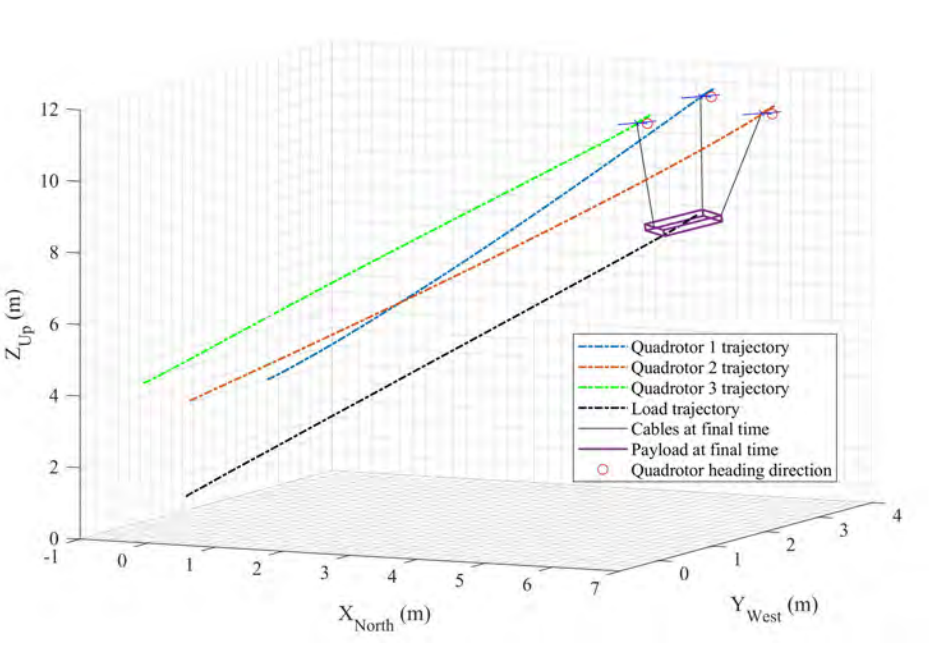
In this project the problem of carrying a single load using multiple quadrotors is being examined. The main goal is to build a control system that will enable us to transport the load safely while maintaining a constant altitude above the terrain.
In this project the problem of carrying a single load using multiple quadrotors is being examined. The main goal is to build a control system that will enable us to transport the load safely while maintaining a constant altitude above the terrain.